

3月20日,通用智能机器人公司非夕科技(Flexiv)在上海召开“FLEXIVERSE 2026”年度战略新品发布会。
发布会现场 主办方供图
围绕机器人在真实场景中的核心能力,此次发布会推出Enlight初昕系列全感知自适应机器人、Orion天枢新一代架构控制器、一体化仿人智能平台MICO,同时非夕科技也升级了此前已发布的壁虎材料夹爪,形成覆盖“本体—控制—系统”的整体能力体系。
非夕科技认为,机器人要真正成为基础设施,关键不在于单一场景的突破,而在于是否具备在非结构化环境中持续、稳定工作的系统能力。“机器人真正进入真实世界,需要的不只是算法‘大脑’,更需要可靠的多模态物理‘躯干’。”非夕科技创始人兼CEO王世全表示,“非夕长期聚焦本体能力,旨在为产业提供连接通用智能与真实世界的重要基石。”
“非夕正将过去十年的技术积累沉淀为通用的系统能力。”王世全表示,希望通过构建这种“物理底座”,让机器人能够像人类一样,感知、理解并改变物理世界,为具身智能的广泛应用提供最坚实的土地。
从本体到系统,机器人高效进入真实应用场景
据介绍,通过Enlight、Orion与MICO的协同发布,非夕进一步完善了从机器人本体到系统平台的整体能力布局。这一产品组合不仅提升了机器人在复杂环境中的操作能力,也为开发者与行业伙伴提供了更加完整的技术基础,使机器人能够更高效地进入真实应用场景。
作为非夕新一代轻量化机器人产品,Enlight(初昕)系列机器人进一步强化了机器人在复杂环境中的感知与操作能力。
据介绍,在感知层面,Enlight在全关节层级集成了高精度多维力传感器,最多支持同时7点接触,具备毫米级位置感知精度,0.5N级别的触控力感知精度。这意味着,机器人不仅能敏锐感知指尖的碰撞,更能察觉全身任何部位受到的微小受力变化,从而在复杂动态环境中实现极高的交互性和敏捷柔性。

机器人在鸡蛋上雕刻 主办方供图
通过高功率密度执行器与独特的绕线工艺,Enlight的关节径向尺寸大幅缩小,1/3/5/7轴关节运动范围达720°,确保机器人在狭小作业空间内依然拥有无死角的运动自由度。
此外,为支撑高强度作业,Enlight严格遵循工业级标准,其热管理系统经过深度优化,散热效率大幅提升。
为了打破多机协作中长期存在的延迟与算法瓶颈,非夕发布了新一代控制器——Orion(天枢)。在传统方案中,多臂协同通常依赖上层系统协调,存在延迟、复杂度高等问题。Orion通过底层系统设计优化,实现多机械臂之间更高效的协同控制能力,使复杂任务能够更加稳定地执行。
同时,Orion紧凑的硬件形态与开放的系统架构,摆脱了传统控制器沉重、封闭的束缚,为适配各类具身智能载体(如移动底座、人形躯干等)提供了极大的便利。Orion还提供更加简化的开发方式,通过图形化界面降低编程门槛,使开发者能够更快速地实现双臂乃至多臂协同应用。
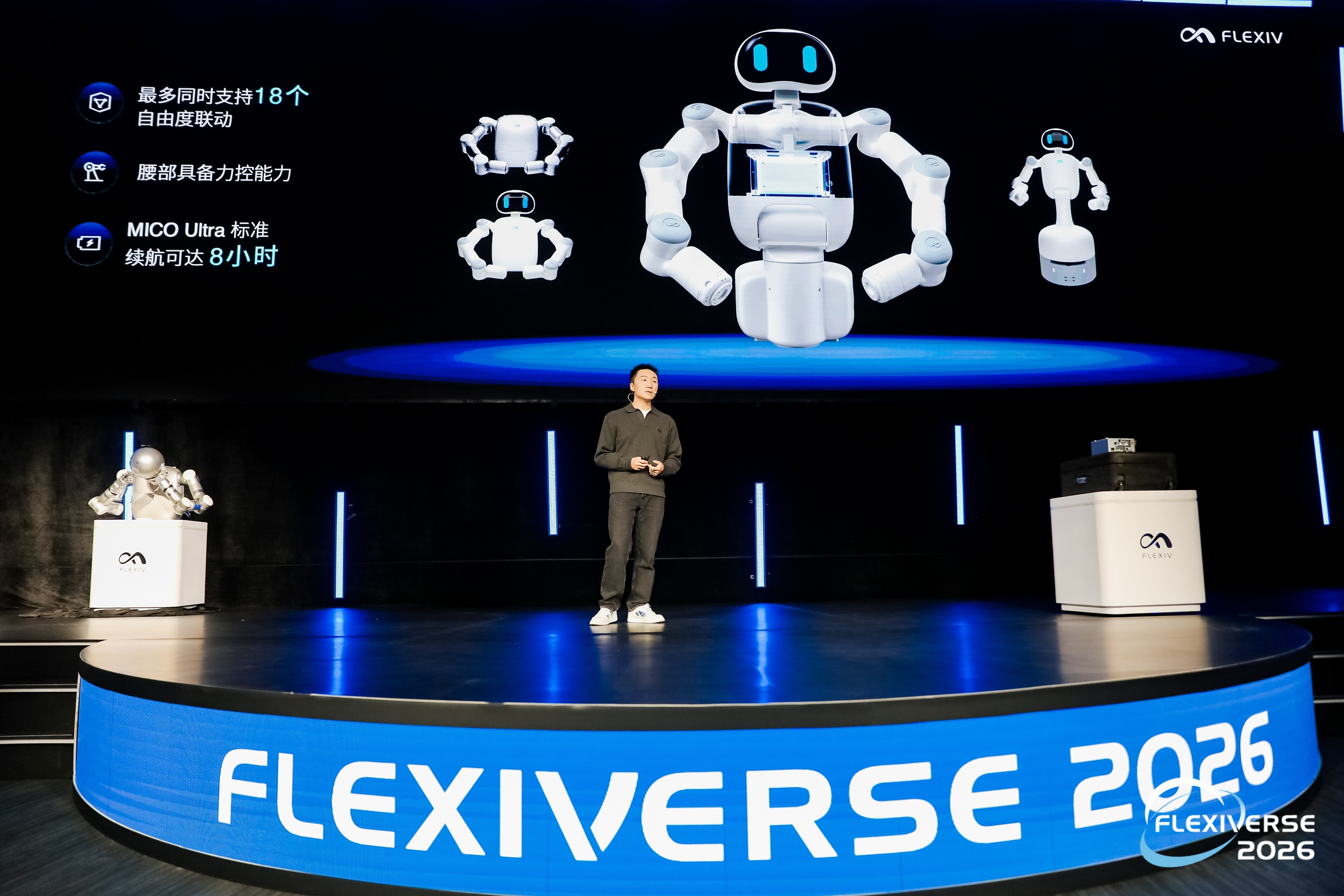
非夕此次推出了标准化、模块化的双臂机器人系统——MICO。作为连接非夕核心技术与行业应用的载体,MICO不仅是一个硬件组合,更是具身智能方案加速落地的理想物理平台。
产品走向全场景,构筑通用智能安全护板
在新产品走向全场景的进程中,安全是基础设施的底色。非夕在此次发布会上推出了“AEGIS 翌界”安全体系。据介绍,这不仅是一套安全功能,更是非夕基于具身智能未来趋势,构建的安全技术架构。
非夕科技介绍称,AEGIS 翌界体系在设计之初深度对标并满足了行业公认的最高难度安全准则—— ISO 10218-1:2025和IEC 61508。非夕利用自研的自适应力控技术,实现了远超传统协作机器人的灵敏碰撞检测与本质安全,为机器人进入医疗、民用、家庭等复杂敏感环境提供了最权威的技术背书。

自适应机器人按摩
AEGIS 翌界还内置了包括安全速度监控、安全坐标监控、自定义安全平面、刹车测试系统在内的28项主动安全功能。它将安全逻辑从简单的“被动停止”升维为“主动预判”,确保机器人在非结构化环境中依然能够实现安全、流畅的作业。
此外,发布会还推出了增强型壁虎材料夹爪。据非夕科技介绍,作为机器人的“手”,升级后的星擎(Grav)Enhanced夹爪不再是简单的执行工具,而是集成了仿生材料科学与精密力控的智能终端。
基于非夕科技自研的壁虎材料,升级后的Grav夹爪配合“刚柔双模式”切换,机器人既能抓取沉重的工业零件,也能轻柔处理易碎、易变形的物体。
南方+记者 张晋 朱红鲜
加倍网提示:文章来自网络,不代表本站观点。







